We favor Roberts' "Flying Electric Generator", a "rotorcraft", for addressing the world's major energy and global warming problem objectives. He and his colleagues have already demonstrated that FEGs can generate electricity efficiently at low altitudes when a strong wind blows using a method which it is clear should also also work at truly high altitudes and be scalable well beyond the practically achievable capacity ratings of ground based wind turbines. We believe the FEG technology will lead the way in capturing the energy at these truly high altitudes where the very high altitude wind energy exists.
We suggest that engineers may wish to review the peer reviewed paper "Harnessing High-Altitude Wind Power" of the IEEE Transactions on Energy Conversion, Vol 22, No.1, March 2007 we submitted, co-authored by Ken Caldeira and Elizabeth Cannon, Dean of the Schulich School of Engineering, University of Calgary.
The Robert's "rotorcraft" pictured at the upper right resembles a tethered elementary helicopter with no cabin. It has two rotors each fifteen feet in diameter.
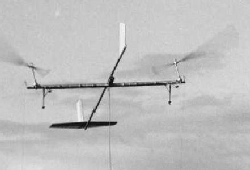
In the picture to the right, the craft has been tilted by command, and the wind on this unusually windy day is turning the rotors, thus both holding up the craft and generating power which is transmitted back to the ground."See Australian Demonstration Site Photo"
You may also wish to click on "Video" at the upper right corner of your screen to view this demonstration in Australia many years ago.
Tests of a larger rotorcraft tethered at up to 15,000 feet and above is planned. This FEG, and others at higher ratings up into the megawatts range to follow, will each be using a single tether, with the same strength member materials used now by the military and NASA for high altitude and space tethers.
We get many questions about weight and electrical losses in the tether, and other aspects. Tether technology is not simple, but a number of vendors now compete in this field selling primarily to the military and NASA. Transmission is at high voltage, which means that small diameter, light, conductors may be used. The electrical losses which do occur, while not sought, do result in warming the tether, which is desirable.
Lightning and atmospheric static discharge as they affect tethers containing conductors are problems frequently brought to our attention. The name of Benjamin Franklin is often mentioned. However, the frequency of conditions in which these atmospheric conditions are a potential problem is close to zero in key parts of the world needing energy the most. This includes much of the United States, as may be seen by clicking on this NOAA link to view Vaidala's NLDN 5 year Flash Density Map: http://www.lightningsafety.noaa.gov/lightningmap.htm.
Even where lightning conditions do seasonally exist, with good warning provided by current technology, FEGs will be grounded, and returned to service rapidly after the passing storm. Furthermore, lightning problems have been addressed and solved in other tether applications and will be utilized by FEGs when conditions are not severe.
In addition, programmed electronic controls, using GPS and gyroscope attitude sensing information, assure that rotor pitch and airfoil control surfaces react in damping fashion to the FEG movement in this situation.
Other Tethered Wind Energy Capture Methods
We also get asked if other methods of generating power from high altitude winds might not be even more feasible, with wind turned generators supported by blimps being mentioned most frequently. Other methods are feasible, being pursued, and should be.
It should not be assumed that one method is best for all situations. For example, in medium velocity winds not at very high altitude, a blimp incorporating wind turned generators may do much better than a ground based wind turbine beneath, and, because FEGs need part of the wind energy to provide lift, also do better under these circumstances than FEGs designed to capture the higher energy winds at higher altitudes.
However, at these higher altitudes, where the very high energy and persistent winds exist, the high drag components of the balloon elements which do not contribute to power generation are a handicap not true of the rotorcraft of Roberts' design, in which the lift is provided by the wind itself. Some energy is used to do that, but usually small in proportion to the energy producing electricity. Thus, each method has advantages in different situations and for meeting different objectives.
History shows that the first method almost everyone considers for capturing the energy in the better winds above those that can be reached by ground mounted wind turbines is to let a rising kite use a tether to turn a generator on the ground. After rising to a desired height, the kite's attitude is changed in a way that makes it descend due to gravity with minimum exposure to the wind and requiring little or no power to effect the descent. Patents on varieties of this method date back decades.
The low cost rising kite solutions should indeed be very good to supply or augment power at farms and other facilities at remote locations where there is good wind. This is especially interesting relative to capturing the relatively low altitude trade winds in the tropics where the really high altitude winds are not strong.
However, it should not be assumed that lightning is no problem for rising kites pulling up a non-metallic tether turning a generator on the ground. If lightning is likely, the tethers probably will be wet, thus requiring the same precautions as for methods containing conductors.
Further, in attempting to use the rising kite method in the temperate zones of the Northern or Southern Hemispheres to capture the energy in the really high altitude winds on a mass scale, there are significant problems to be overcome.
During even mild turbulence, especially for multiple kites on the same tether, control to avoid entanglement poses a very difficult problem. While the "kites" in fact may more resemble gliders than the kites most frequently seen in a park, the power to control surfaces such as ailerons and rudders must be supplied, and yet electric power is not available for this purpose. Also, it is hard to see how GPS could be used as a basis for control of each of multiple kites attached to a single tether, unlike the situation applying to FEGs, each of which has a separate tether.
There is also the problem of raising the kites to an altitude where there is sufficient wind to go on up from there when there is little or no wind at ground level.
Nevertheless, these concerns may be overcome more readily than it appears to us. We hope we will be excused for pointing out reasons our own approach heads in a different direction. Certainly this website receives enough skeptical emails to know no approach is going to receive universal endorsement at this stage of the game.
We heartily endorse the undertaking of competitive approaches. There is plenty of room for all, and we hope that the proponents of each of these approaches will cooperate to bring the potential of high altitude wind power to the world's attention.
We look forward to the establishment of an organization of enterprises pursuing high altitude wind energy capture technologies with the purpose of cooperating on matters of common interest.
We can't help remarking, however, that with population increasingly located in urban environments, we believe that the FEG technology, located at rural locations not very far from urban centers, in connection with electrical grids serving the urban as well as rural needs, appears to best meet this need. And addressing this need is our main goal.
Regardless of approach, proponents of each technology should calculate the projected capacity factor of their approach at sites intended for use. If for truly high altitude use, the radiosonde data available on the NOAA website is an excellent tool to help in these calculations. At lower altitude sites, actually flying kites over extended time periods and measuring forces can also lead to approximate figures at very low cost.
Still other methods for capturing wind energy above that possible for ground mounted wind turbines have been proposed. Some are still being considered and some have been discarded. It is also clear the technologies that now are being pursued are still at a very early stage, and who knows what approaches are still to come.
What is clear is that it is indeed an exciting time for engineers, self taught by doing or experienced, with a mission of great importance to the world.
But, back to discussion of the rotorcraft FEGs, it should be understood that the fact that a FEG rotor is turning does not stop its surfaces from also having a kite-like lifting action. Depending on the angle of the rotor plane to the horizontal, there is an energy division between the wind energy going into lift and the wind energy going into generating power. Since this angle can be controlled, it is continuously set automatically to keep the FEG at the desired altitude and generate rated power if possible, but not more. While lift would appear to be important, in most situations the rotorcraft of Roberts' design use relatively little of the wind's energy to provide the lift to stay aloft compared to that used in generating power.
FEGs are free to fly at the best altitude at any time, taking into account both wind velocity and expected turbulence. Towers don't have that freedom.
We also get asked if FEGs are not subject to the same problems helicopters are when they attempt to fly at high altitudes. The answer is no. Helicopters designed to hover with loads at low altitude have increasing trouble as air density decreases and motion of the air mass has no benefit. However, the faster moving air mass at high altitude far more than compensates for the lower air density in the case of the tethered FEGs.
GPS technology is to be used to assure that the rotorcraft stays within a few feet both horizontally and vertically of where it is commanded to be at high altitude. This is very important to assure that FEGs will stay separated enough not only to avoid collision, but also to avoid interfering with each other's efficient access to the available wind energy, a problem known as "wind shadowing". Fortunately, with three dimensions in which to operate, this is much less of a problem for FEGs than it is for wind turbines based in the two dimensional ground surface arrays.
The GPS and gyroscope combination is also used to control the rotorcraft's attitude, i.e. pitch, roll and yaw. This use of GPS for attitude control is in use on the space station orbiting the earth as well as on Unmanned Aerial Vehicles.
Remembering that only much smaller rotors are necessary per megawatt captured in the high velocity high altitude winds, long range, rated capacities of each FEG may be expected to be in the ten megawatt range instead of the highest current tower mounted turbine capacities of about five megawatts.
However, instead of two rotors, these FEGs will use four in a square arrangement, or more in bigger arrangements. For example eight, each rated at 1 Megawatt, for a total of 8MW. Fortunately, tether strength to weight ratios actually improve as sizes scale up, and guidance control weight goes up less than proportionately with size. In other words, within reasonable limits, efficiency may be expected to improve with scale.
Use of more than two rotors permits avoiding the biggest component maintenance problems of two-rotor helicopters, caused by "cyclic pitch", in which the blades are forced to change pitch back and forth by "swash plates" during every rotation.
Avoiding these problems is accomplished by the use of "collective pitch", in which blade pitch remains constant through complete revolutions, using temporary change in the constant pitch of pairs of rotors when direction change (left, right, up, down) is desired, the pairs selected depending on the direction change desired.
Use of this collective pitch approach is crucial in keeping maintenance costs low and assuring FEGs being able to fly for substantial periods of time between landings for maintenance. It is fundamental to the economics.
